




在【测评第一弹】中,小岚就手持建图、ROS兼容、倾斜补偿等方面展示了Mapper 【M1M1】的实际使用效果,很多人在后台留言,直呼不过瘾。还没看过的小伙伴可通过 传送门 了解一下。
今天,小岚放出测评汇总第二弹!继续实测!让你看个够!
粉丝调侃:左二小乌龟海绵垫,是不是预示着与ROS的不解之缘
测评部分内容无改动,无删减!
测距距离稳定
官方宣传说,SLAMTEC Mapper是一款内置“定位和建图”的激光建图传感器,所以很多用户在拿到Mapper的第一时间,就去实测了测量距离Vs官方标定距离。下面,我们看看,有没有差距:
室内:
雷达距离
LaserScan ls = robotPlatform.getLaserScan(); String head_tip = "distance angle valid"; for (LaserPoint lp: ls.getLaserPoints()) { String lp_txt = String.valueOf(lp.getDistance()) + " " + String.valueOf(lp.getAngle()) + " " + (lp.isValid()? "true":"false") + ""; outStream.write(lp_txt.getBytes()); }
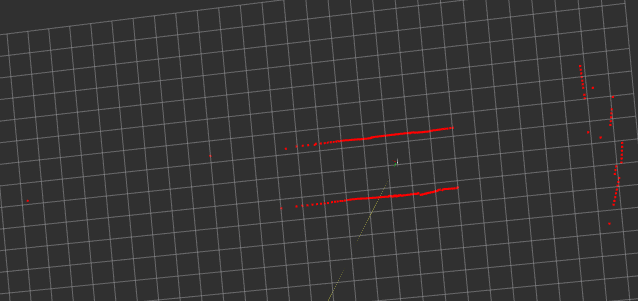
从取出来的数据可以发现,有效的雷达距离最远可到17m,更远的距离因为环境所限,⽆法测试完全,但和官⽹标称也基本一致。
内容提供者:赵放

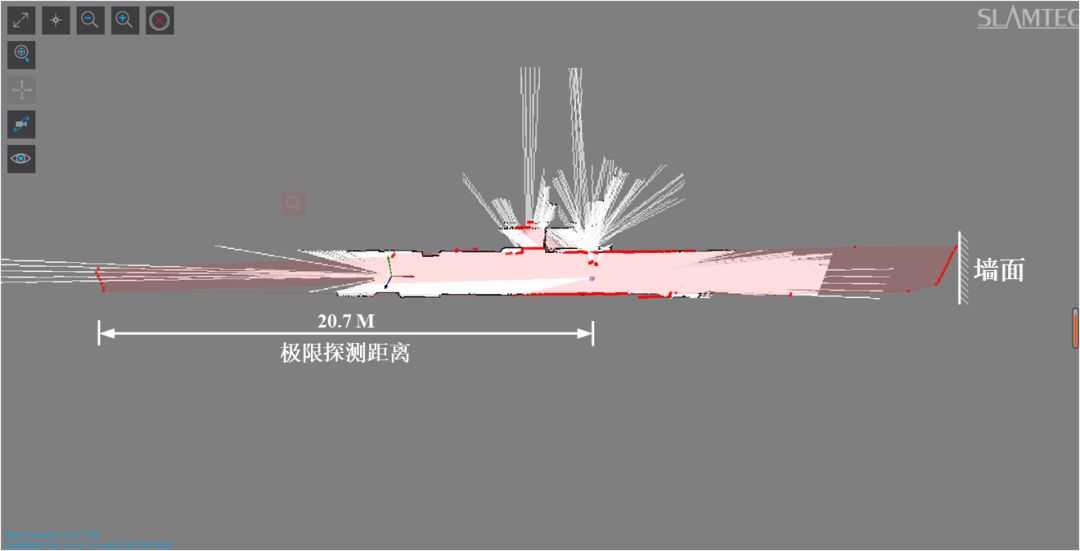
对左图所示的过道进行极限探测距离测试。通过一块挡板的前后移动来控制探测的距离,得到Mapper的探测极限距离约为20.7 m,与关键性能指标上的雷达探测距离20 m相吻合。
内容提供者:石东松
室外:
室外实际测量半径亦如此:
从实际效果上看slamtec mapper能扫描的距离大约为17.6m,与宣传相符。
内容提供者:钱学成
上手快,新手无压力
此款mapper在入门使用上还是比较方便的,完全没有使用过激光雷达的人,也能通过RobotStudio的软件,通过简单的教程设置,观察到它的使用效果。

非常适合用笔记本搭载小车进行测试,笔记本的wifi连接上mapper发布的SLAM热点即可。但如果用台式机的话,要配置专用的无线网卡。
内容提供者:汪国来
总体性能还是不错的,有wifi功能挺方便的,既可以当作普通雷达使用,也可以作为集成SLAM算法的开发套件,比较适合初学者,能够满足简单SLAM功能需求。运动速度1m/s,精度5cm,不适合做高速下的SLAM,但是室内导航完全足够。

在ROS环境下开发
内容提供者:张楠
超高建图性能,一个不落下
1
大场景高品质构建地图
本人在环境面积为500平米与1000平米的室内进行了手持建图,建图效果如图3、图4所示。

图3 500㎡
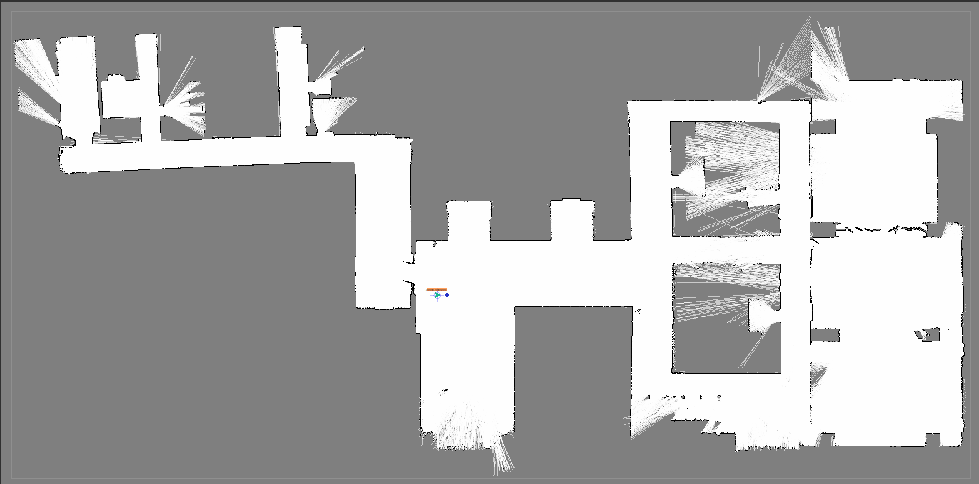
图4 1000㎡
手持建图在建图效果上比较好,图3上地图特征比较明显,走廊没有出现偏斜,直角特征也较为准确。图4中最开始出现了大幅倾斜,并未影响后续建图,左侧长廊出现了轻微偏斜。
内容提供者:白亮亮
2
建图闭环
【建图闭环】这个,肯定是很多人都关心的问题!
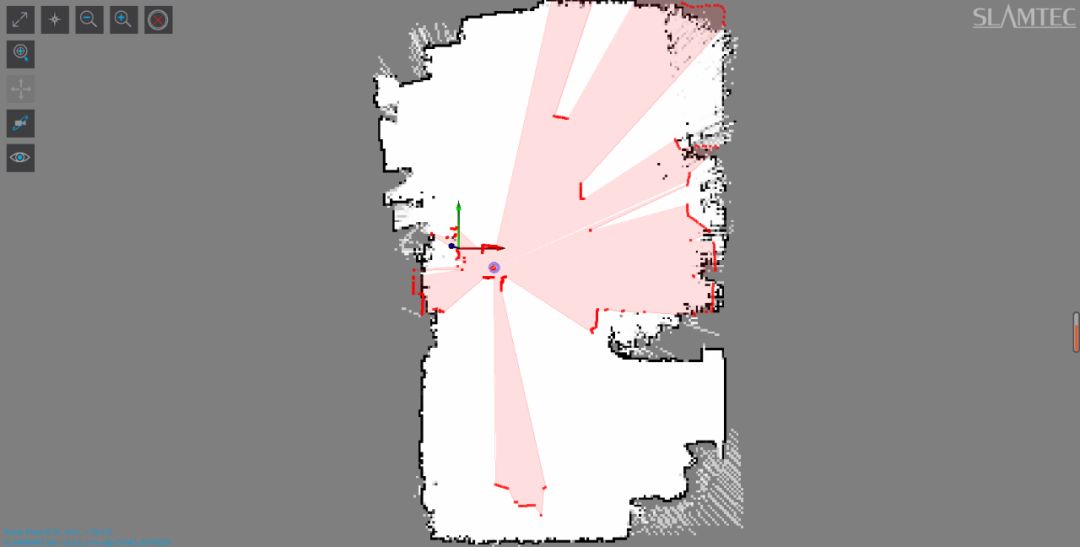
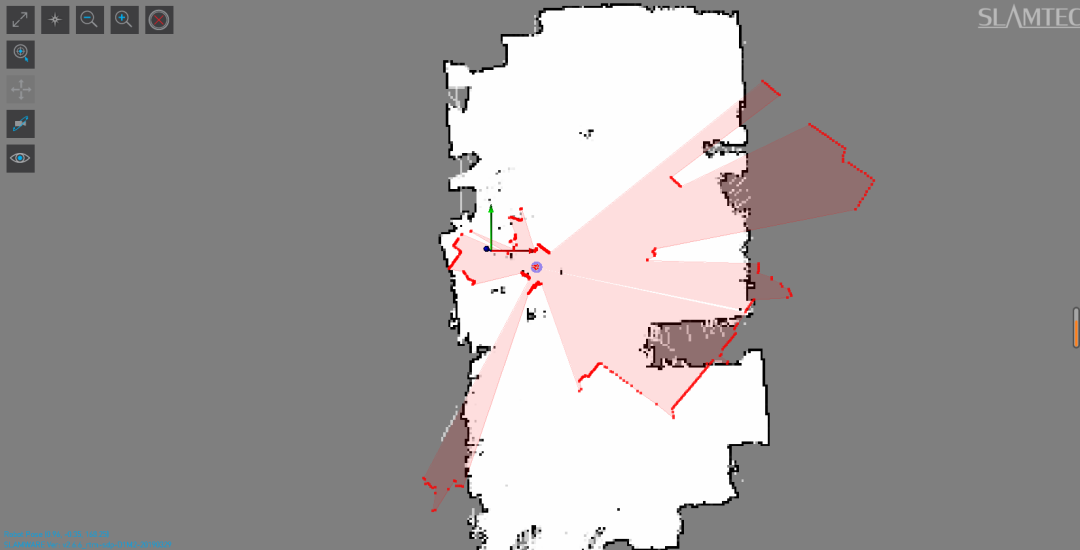
我们在公司内进⾏测试,⼤⼩约为100m * 60m,从起点出发,中间经过⼯位,⾛廊,茶⽔间,会议室,途中有较多 玻璃⾯板,经过⼀圈,回到起点,最后构建的图如下所示:

总结:从图中可以看出,在当前⼤⼩的⾯积内,Mapper很hold住各种复杂的条件,最终回到起点时,主观基本⽆任何 累积漂移或重叠,重建的地图经过⽐对和实际尺⼨⾮常接近,因为⽆专业设备测量,因此⽆法给出精确值。
Failure Case 重复多次实验,只有在⼀次靠近玻璃门⼝,光线太亮的情况下,Mapper⽆法⼯作,其他情况下均能成 功定位和建图。
内容提供者:赵放
3
复杂环境下建图无压力(明/暗)
实验室复杂环境下开灯关灯试验:
开灯
关灯
以上两次测试均在实验室手持状态下,绕着实验室内行走一圈得到的建图模型。虽然实验室内部设备众多,路况繁杂,但一次行走两次试验均能得到比较完整的轮廓信息。其中左图为实验室灯光全开的状态下进行的试验,右图为关闭实验室所有灯光,全黑状态下的建图结果。
虽然Mapper的主动光源采用近红外波段(个人猜测,光源具体波长官网没有给出明确数值)已经可以排除大部分环境光,但在关灯的情况下得到的内部轮廓更加平整,接近建筑物墙体本来的面貌。(也有可能是在关灯情况下,人的步行速度更慢,扫描得到的结果更好。)
内容提供者:石东松
以上
就是SLAMTEC Mapper【M1M1】测评第二弹的内容
另外,想看测评视频的,可直接移步


